



ԭ�ʹ��ߴ���ҵ��е�ֵ����
��Դ�����ܵ���������־ ���ߣ��Ż�ǿ ʱ�䣺2020-2-4 �Ķ���
�����ܵ���˾�����������ֹ�˾
ժ Ҫ������ԭ�ʹ����ڸߴ���ҵ���ա���ҵ��е����������Կ�������˹�������������ҵ���ա������һ�ֹ�ҵ��е�֣�����е��ơ�����ϵͳ��һ����������Ϊһ�塣��е���������������Դ����˹���ҵ��
�ؼ��ʣ����ޣ���������ҵ���գ���ҵ��е��
�����˻�е�ֶ����ڷ������������谭����ʩ����ҵ���Ԯ��չ�ij��ϡ�����ԭ�ʹ�����ڷ�����ʴʱ��Ϳ�������������Ϳʩ������ô���ּ��˹���Ϳ�����ڸߴ���ҵ���ա����ľݴ����һ�ָߴ���ҵ��е�֣�����˹���ҵ��������ҵ���ա�
1 ��е�ṹ
1.1 ��е�ؽ�
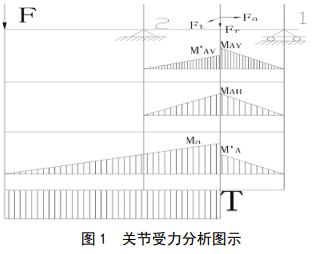
��е�ֲ��ñ۽ṹʵ�ֿռ����У��۹�����Ҫ��ɲ����ǻ�е�ֹؽڣ�������֧�ֻ�е�֣����ٽ���Ŀ����˶���ʵ����Ŀ������Χ���ƶ��ı��е�ֵ�λ�ã���λ�ǣ�����е�ֹؽ�ѡ����״����ĸֽṹ���ؽڵ�����������ͼ1��ʾ��
����������ϵ��Ϊ��

����Ӧ��Ϊ��
Ť��Ӧ��Ϊ��

����Ť�ϳ�ǿ�Ƚ���У�˼��㣬���ڵ���ת����ת�ᣬת�ذ�����ѭ����������ȡ�ۺ�ϵ�� a =0.6������Ӧ��Ϊ��
��GB/T 699�D 1999�� ����̼�ؽṹ�֡����涨45#�ֿ���ǿ��Ϊ600 MPa����������Ӧ��60 MPa���˴�ѡ��45#����Ϊ�ؽڡ�
1.2 ����
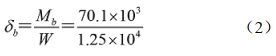
��ҵ���������ɶ�������Ϊ�����ɶ������������ɶ������������ɶ������ݱ���ʵ��ʹ��Ҫ����ưڶ���ת���������ɶȣ�֧�źı��е����̬����е�ֽṹ��ͼ 2��ʾ��
2 ����ϵͳ
2.1 ����оƬѡ��
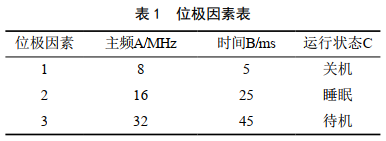
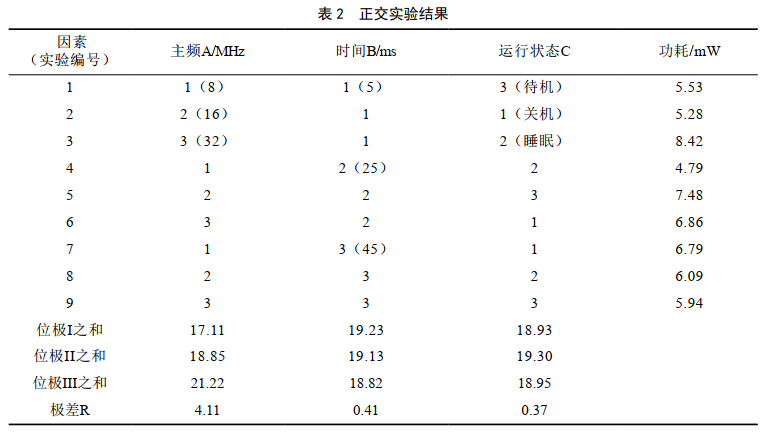
����ϵͳ��Ƭ����������ʵ��ȷ��������CPU��Ƶ��������ѹ���ʱ�䡢����ʱ������ʽ���������в�����ÿ������ѡ3��λ����λ��������� 1��ʾ��ѡ��L9��34������ʵ�飬 9��ʵ������� 2��ʾ��
��1���������
����R����ߣ��Խ��Ӱ��̶���ߣ� R��С��Ӱ��̶���ͣ���������Ҫ�̶�����ΪA��B��C��
��2��ֱ�۷���
3��ʵ�����Ĺ���Ϊ8.42 mW ,������ţ����ԽϺõķ���ΪA3B1C2��
��3�������
λ����Ӧʵ����Խ����Ч��Խ�ã���λ��֮�Ϳ��Կ������Ϻõķ�����A3B1C2��
��4���ۺϷ���
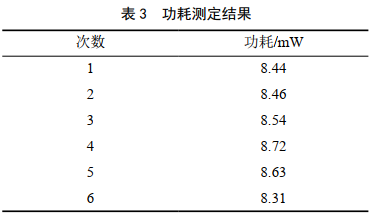
��ֱ�۷������͡�λ�����㡱���һ�¡����ڵ�������ʱ����������ԣ� C�����������Ҫ���أ��Խ��Ӱ��С����ѡ��C1������ȷ������ʵ����ΪA3B1C1���ݴ˲ⶨ������� 3��ʾ��
ͨ��ʵ�鼰������ѡ����Ƶ32 MHz��ʱ��5 ms�ĵ�Ƭ������������Ҫ��
2.2 ����ϵͳ���ص�·
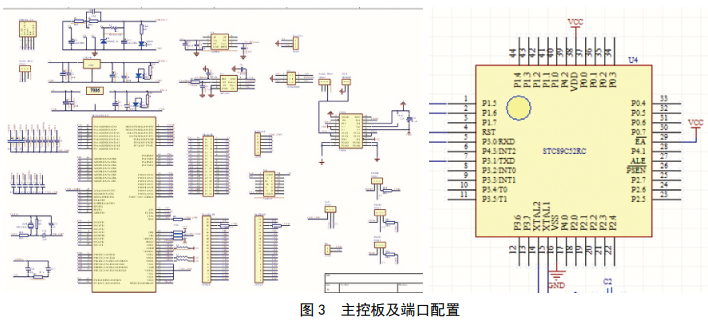
����PCB�弯�ɿ���ģ�飬��ƿ���ϵͳ���ص�·��Ƭ�����ƶ˿ڡ�ͨ��I/O �ڣ�32 ��������λ��P1/P2/P3 ��˫���/�������� P0����©����·�������Ϊ������չ��ʱ���ü��������裻��Ϊ I/O ����ʱ������������衣 ISP����ϵͳ�ɱ�̣� /IAP����Ӧ�ÿɱ�̣�����ͨ�����ڣ�RxD/P3.0�� TxD/P3.1��ֱ�������û��������뼴����ɡ� 3 ��16 λ��ʱ��/������������ʱ��T0�� T1�� T2���˿����ã���ɫΪʹ�ö˿ڣ������ص�·����Ƭ��������ͼ 3��ʾ��
2.3 ��������
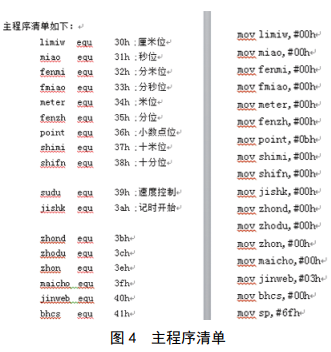
�������������ݴ��������̿�����������������ƣ��������嵥��ͼ 4��ʾ��
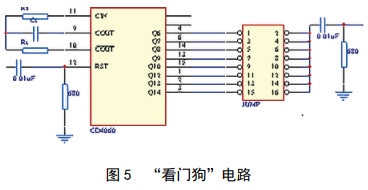
Ϊ��ֹ���� �������������ӡ����Ź�����·����ͼ 5��ʾ��
�����Ź�����·�dz��켼������CD4060�Ǵ�������14λ����������Ƶ�� f �� RT�� CT������R S���ڸ����������ȶ��ԣ� R SҪ����RT��һ��ȡRS =10 RT����RT >1 k���� CT ��100 pF�����RS=450 ���� RT=45 ���� CT =1 uF���� f =10 Hz�� 4060����Ƶ�ʺ�Q i�� i=6�� 7�� 8�� 9�� 10�� 12�� 13�� 4����ѡ��Ҫ�������ȷ���������ʵ�����蹤������ΪT ����Ƶ������ʱ��ΪT' ,�� T' >T ��ϵͳ��������ʱ������ÿ�� T ��4060ɨ��һ�Σ���Ƶ������������źš���ϵͳ������������������ܷɡ���ѭ���ȣ��������4060������ɨ���źţ���Ƶ��������������ź�ʹCPU��λ��
3 ����
��ƵĹ�ҵ��е�ֿ�����˹���ҵ��������ҵ���ա���е�ֽṹ�Ϳ���ϵͳ��������������Ҫ�����һ�Dz�ͬ�ṹ������ģ��֮������ӣ����Ż�ģʽ����߿���ϵͳ����ˮƽ��������ѧ������ǿ�ȡ��նȺ���ѵı۲��ṹ�д�Ӧ�ü�����Ż���ֵ�ý�һ�����ۺ������о���
���ߣ��Ż�ǿ�� 1991�����������ܵ���˾�����������ֹ�˾ʵϰ������Ҫ���³���ܵ�ѹ����ά��ά������ȫ����������
��ƪ��
��ƪ��
 �ʹ������� 62010202003034��
�ʹ������� 62010202003034�� 
