



һ�����ڴ��װ�ȱ���Զ������װ�����
��Դ�����ܵ���������־ ���ߣ�������1����ά��2��������3 ʱ�䣺2018-7-3 �Ķ���
������1������2��������3
1�����Ϲܵ������������ֹ�˾
2���й�ʯ�ܵ��Ƽ��о�����
3��������̽���̹�˾�ͽ���˾
�����Ǵ洢ԭ�͡���Ʒ�͡�ʯ����Ʒ��ԭ�ϵ���Ҫ�豸�����Ŵ��Ĵ��������ʹ�ã����ް�ȫ���е���Ҫ��Ҳ�����ԡ����İ�ȫ������Ҫ�Ǵ��ĸ�ʴ���ر��ǹװ帯ʴ�Լ��ɴ���ɵ�й©������һ���������⣬����������صľ�����ʧ�ͻ�����Ⱦ������������ص������¹ʣ�ֱ��Σ���˵�������ȫ��Ϊ��֤���İ�ȫ���У�������Ҷ��ƶ�����Ӧ����ҵ������ұ����涨���װ�ļ���Ǵ�����е�һ���������[1]��
�����ڴ��װ�ȱ�ݼ��ļ����У�����������⡢©�ż�⡢���������� C-ɨ��[2-3]�ȡ������⼼��Ч�ʵ͡��ɱ��ߣ���Ҫ�������ߡ�����⣬�Ҽ��ǰ����������ա���ࡣ������ʱ���������ҳɱ��ܸߡ�����������⼼�����ԶԴ���ʵʩ����⣬���Ҽ��ʱ��Ҫ��Դ�������պ���ࡣ�ü������ԶԵװ����100%��ֱ������[4]���dz��ʺ��ڴ��װ�ޱڵ����������⡣
1 ���װ�ȱ�ݼ����״
�ڴ��װ�ȱ�ݵ�ƽ�嵼�����Ӧ���У����ڼ��Ч�ʵ͵�ͻ�����⣬��Ҫԭ���Ǵ�������ɨ�跽ʽ������Ч��������ȡ�˹��ƶ��ķ�ʽ���������Զ��н���ʽ����ÿ���һ�ξ���ĵװ��⣬�˹�������Ե�ϵĴ��������µļ��㣬�ڲ�ж�������������������Ӷ�����˳�����������Ч�ʡ�Ϊ��Ӧ����һ���⣬�ഫ�����ķ�ʽ�������á����ǣ��ഫ�����ķ�ʽ������ʵ���Խ�����Ч�ʵ͵����⣬ֻ���� һ���̶��ϻ���[5-7]��ԭ���ǣ����ȣ��ഫ�����ķ�ʽ��Ȼ��Ҫ�˹����ò��ƶ���������û�м�������Ա�Ĺ������������Ŵ��Ĵ��ͻ��������Ա���Ͷ�ǿ�Ƚ�������ӣ���Σ��ഫ�����ļ�ⷽʽ��Ҫ��������߱��϶��������ź�ͨ���������˼��ɱ��������ڼ�����Ӧ���ƹ㡣
��ˣ����������һ�ִ�����Զ���װ�ã�����Ҫ���˶�ִ�л����ͻ������ϵͳ��������ɡ���װ����ʵ��������⡢�������Ƕȿ�����Ӧ�����������ٶȿɿ��ơ��Ӷ��ﵽ����Ч�ʣ����ͼ��ɱ���Ŀ�ġ�
2 �˶�ִ�л������
���װ��Զ������װ�õ��˶�ִ�л�����Ҫ��ʵ�ֶԼ������ļг֣���ʹ���ڼ��������봢�ޱ�Ե���������õĽӴ���ͨ�������������ڴ��ޱ��ϣ����ŵ��������ʹ����װ�����Ŵ��ޱ�Ե���н����Ӷ�ʵ�ִ��װ峬���������������Ĺ��̡�

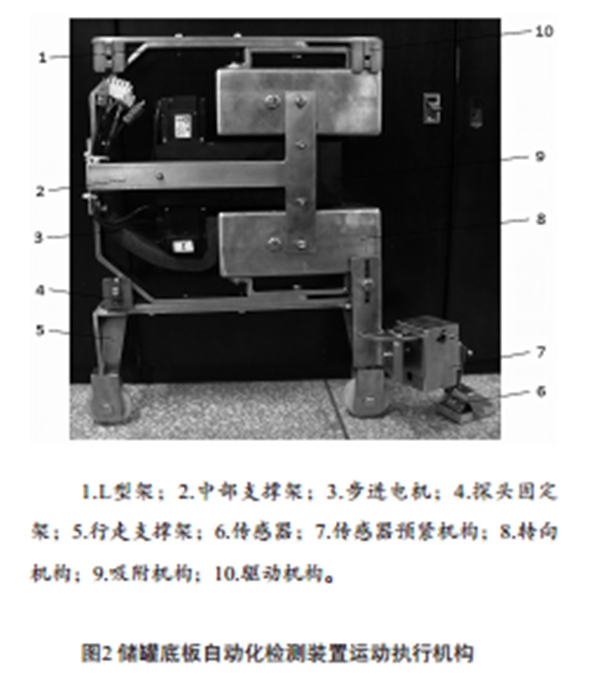
��ͼ1��ʾ�����װ��Զ������װ�õ��˶�ִ�л�����Ҫ���IJ�����ɣ�֧�Ż����������ṹ�������������������гֻ�����֧�Ż�����ʹ���������������������������гֻ�����װ��һ�𣬲�ʹ�����������ڴ������Ե���ϣ������ṹ��Ҫ��2���ŷ�����������䡢���ְ�װ�ǡ����ִ��ʹ�����ж˸ǡ����ʹ��Ž�װ�á����֡������ᡢ������л������������ֵ�������,Ϊ����װ���ṩ���߶���������������Ҫ�ɹ�����С��̶��ס����ֵ�Ȧ�����ֺ�8�����Ż��������ɣ�����ͨ��������ʹ��װ�ý��������ڴ������Ե�ϣ��������гֻ����ǹ̶�����������ʹ����������0��~10�㷶Χ���Զ����ݴ������Ե�����������б�Ƕȣ��ṩ��������һ����ѹ�����������������źŷ��䷽�����������Ҫ�ӹ��������˴��װ��Զ������װ���˶���������ͼ2��ʾ��
3 �������ϵͳ���
3.1 ϵͳ����
�������ϵͳ��Ҫ��ͨ�����������ʵ�ֶ��˶�ִ�л����а�װ������˽��������й��硢�ٶȿ��ƺ��ر������������������������п��Ƶ������ת��ť����Դ���ذ�ť�������̶��ٶȰ�ť���������������λ���ذ�ť������������������ת����ʾ�������ָʾ�Ƶ���������ͼ3��ʾ��


���������ϵͳ��������ֵ�����ٷ�ʽ��һ���Ǹ��ݼ��ϵͳ�ź�ʶ���ٶ��趨�������̶����ת�٣�ͨ�������ٶ�1���ٶ�2��ťʵ�֡������������ٶ�1���ٶ�2��ťʱΪ�����趨�ٶȣ���ͬʱ����������ťʱΪ�������趨�ٶȡ��������㣬���������ת�ٷֱ��趨Ϊ100ת/�֡�200ת/�֡�300ת/�֣��Ӷ�ʵ�ּ������������ٶ���0.5mm/s-4mm/s֮�䡣�÷������ŵ����ٶȺ㶨��������ȱ�����ٶȵ�һ����һ���ٶȵ��ڷ�ʽ��ͨ���ٶȵ�λ�����ı�����ѹ���Ӷ�ʵ�ֵ���ӵ͵��ߵ������١����ַ�ʽ���ŵ��ǿ����ںܴ�Χ��ʵ�ֶԵ���ٶȵ��ڣ���Ӧ����Ĺ�����ȱ���ǵ��ڵ��ٶȲ���ȷ�����׳����ٶ���Ծ���ڿ�������������������ֵ���ٶȵ��ڷ�ʽ���л����ء�
ϵͳ�е������ŷ�������������������������ƣ���������������ͬ���ԣ��Ӷ�ʹ���ŷ����ת����ͬ�������ӵ�ж�����Դ�ߺͿ����ߣ��������ϵ�I�ᡢII�������߷ֱ����˶������е�I��II���ŷ���������ӡ�����ͨ����������ϵ�����ת�л����ظı���װ�õ����߷������ڼ��װ���ڼ������п�����������Խ���ϰ�����װ��ֹͣ������ʹ�����ס������ת�������������������ջ�������������˹��ر�����·���Ե�����غ�Ļָ������ֱ������������λ���ء�
3.2 ��ʼ��������
����ƻ������ϵͳ�����趨�ٶ�ʱ����Ҫ�Ե���������ߵ��ԡ����ŷ��������ͨ��sigmawin+רҵ��������������߲�������[8]����ͼ4��ʾΪsigmawin+�������档�������ߺ͵�Դ�߰ѵ���������������ӣ�����USB�����߰ѵ�����������������Ȼ������sigmawin+�������Ϳ��Զ��ŷ�����������ߵ��ԡ���ͼ5��ʾ��
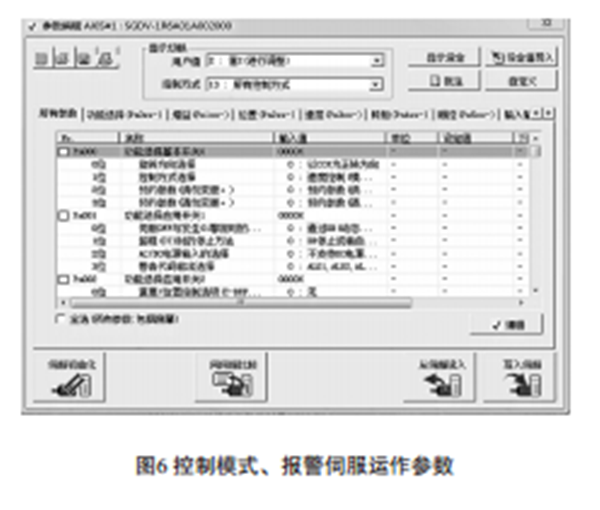
ͨ��sigmawin+��������ʵ�ֶ��ŷ�����Ŀ���ģʽѡ��(λ�ã��ٶȣ� ת�ؿ���)������ʹ�á���ʹ���趨������ʱ���ŷ������������ת������趨��I/O�źŵĿ��ϡ��������桢λ�þ�����λ���ٶȡ���ת��ָ��źš��㶯�ٶȡ��й�ת���ٶȵIJ��������������Ȳ��������á�������Կ���ģʽ���ڲ��趨�ٶȡ�����ʱ���ŷ�������������Ӧ�趨��������������Ĭ��ֵ����ͼ6��ͼ7��ʾ��

4 �ܽ�
���װ��Զ������װ�þ��������ص㣺
��1����������Я��װ��Ӧ�������ǿ���ʺ���ʽ���װ�ȱ�ݵij�����������⣬ͬʱҲ����Я�����������ʵ�����Ե��ij���ɨ����
��2����������Я��װ�ÿ�����Ӧ�������Ե����������仯�����ܴ������Ե�����α估��ʴ��ɵı��治ƽ�����ص�Ӱ�죻
��3����������Я��װ�ù���Ч�ʸߣ���ʵ�ּ������������˶�������ڼ䲻��Ҫ�˹���Ԥ���������˶���
��4����������Я��װ����չ��ǿ����ȥ�����������������ʹ�������ǻ��ֱ���ڴ������̶� �����ϰ�װ�����ض����װ�Ĵ���������Я�������������������⼼�����Ӷ�ʵ����һ�����õ�Ŀ�ġ� ��
�����
[1] ������,�´β�.��ʽ��������⼼�����о���չ[J].��������,2009,28(9):1-4.
[2] �й�ʯ�ܵ���˾. �����ܵ������������[M].����: ʯ��ҵ������, 2010.
[3] ������.�����������еĵ�������[J].������,1999,21(8):367-375��
[4] Y.C.Jung,T.Kundu and M.Ehsani,Internaldiscontinuity detection in concrete by Lamb waves,MarerialsEvaluation,418-423,2001.
[5] ����������. �����⼼��[M]. ����: ������ҵ������, 2006.
[6] Ф�;�, ������, ���Ӻ�, ��. ��������������ⴢ�װ�ȱ��[J]. ������, 2008, 30(1): 6-8.
[7] ��Ҷΰ, ������, ��ά��, ��. ��ʽ���װ�����⼼�������̬[J]. ������, 2010 (9): 725-729.
[8] �¾�. ʵ�ֶ������ظ����ܼӹ��Ŀ��Ʒ����о�[D]. �㶫��ҵ��ѧ, 2013.
�����ߣ�����������������ʦ�� 2013���ҵ������ʯ�ʹ�ѧ��е���켰�Զ���רҵ˶ʿ�о���������Ҫ���³���ܵ��豸�빤�չ�����
2014���4�ڣ��ܵ�17�ڣ�
��ƪ��
��ƪ��
 �ʹ������� 62010202003034��
�ʹ������� 62010202003034�� 
