



在役长输管道漏磁法内检测工作原理
来源:《管道保护》杂志 作者:洪险峰 时间:2018-8-14 阅读:
洪险峰
在役长输管道漏磁法内检测,通过在长输管道中投运多通道变形检测器、高清晰度漏磁检测器对管体发生的变形、金属损失等异常点及管线走向进行在线检测,分析检测结果并形成检测报告提交给管道运营商。
1.多通道变形检测原理
多通道变形检测器通过分布在管内圆周的多通道探头感测管道内径变化的机械量,再由与之相连的角度传感器将机械位移量转变为电压变化,并经放大、模数转换后,存储在检测器内部的记录仪中。检测器上安装有里程轮,运行时沿管壁滚动,产生里程数据;内部标记系统与地面标记器配合工作,用于修正里程数据,提高定位精度。随后通过数据分析处理,可以准确的描述被检管道上发生的几何变形的大小和位置(图1)。
1、驱动皮碗 2、探头部分 3、里程轮部分 4、标记系统 5、记录仪部分
图1 多通道变形检测器组成
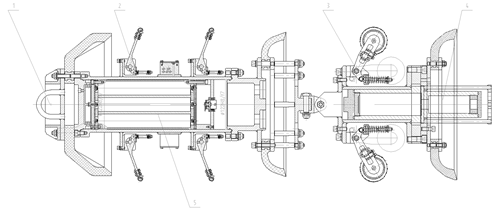
2.高清晰度漏磁检测原理
检测器在管内运行时,利用其上安装的永久性磁铁将管道管壁饱和磁化,当管壁存在缺陷时,磁力线会穿出管壁产生漏磁。主探头拾取金属损失处的漏磁信号,ID/OD探头能够区分管道内壁和外壁金属损失缺陷。里程轮系统实时记录管道里程信息。地面标记系统记录检测器通过设标点上方的准确时间,结合所采集的管道里程信息精确确定管道缺陷所在管道的里程位置,同时周向传感器能够确定缺陷所在管道的周向位置(图 2、3、4)。
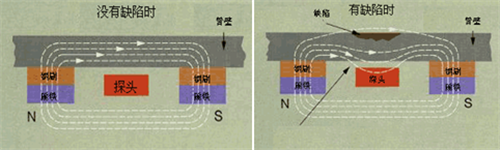
图 2 漏磁检测原理
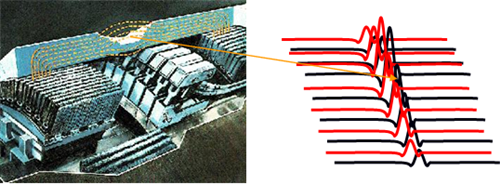
图3 漏磁检测示意图
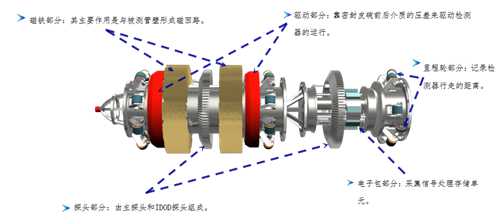
图4 高清晰度漏磁检测器组成
3.管道测绘系统原理
该系统是高清晰度漏磁检测器加装IMU惯性测量装置的组合设备。其原理是由 3 个正交相对的陀螺仪组成的惯性测量装置(IMU)和设备上的加速计测定设备沿管道移动中 X、Y 和 Z 轴方向的角速度和线速度的变化,将IMU中记录的路线与沿管道中心线每1~2 km范围内的地面GPS测量位置相关联,通过三维测绘管道数据来精确描述管道走向(图 5、6)。
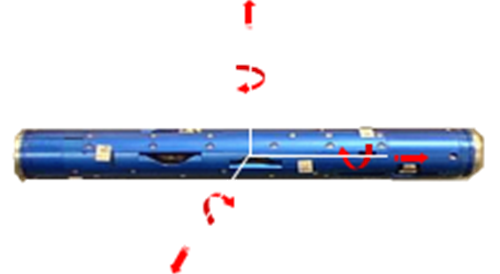
图5 IMU惯性测量装置
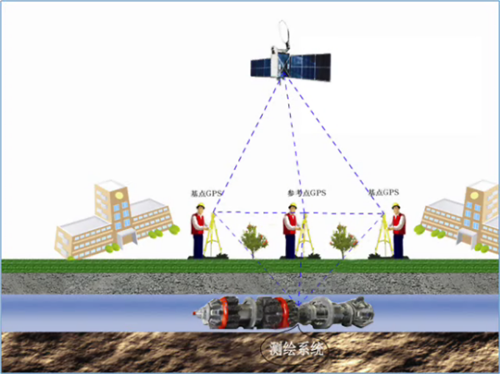
图6管道走向检测示意图
作者:洪险峰,高级工程师,中油管道检测技术有限责任公司研究发展中心主任,主要从事石油天然气管道内检测工业现场应用及检测设备研制工作。
《管道保护》2018年第3期(总第40期)
上篇:
下篇:
 甘公网安备 62010202003034号
甘公网安备 62010202003034号 
