



分布式光纤振动智能预警技术在输油管道防护中的应用
来源:《管道保护》杂志 作者:张玉龙 马新元 苏永刚 时间:2019-5-15 阅读:
长庆油田分公司
摘 要:基于C-OTDR(Coherent optical time domain reflectometer)分布式光纤传感理论,以输油管道同沟敷设的通信光缆作为传感单元,针对管道周边施工挖掘及打孔盗油等可能危及管道安全的事件进行识别。测试结果显示,模拟的激励事件能够准确触发系统报警。实际运行中能够监测并识别出管道附近数十米范围内发生的异常事件,可实现对管道损坏事件的事前或事中预警。
输油管道所处外部环境复杂,若发生损坏泄漏,会造成环境影响和安全风险[1]。因此,有必要对施工损坏及打孔盗油等其它有损管道安全运行的异常事件进行监测和预警。目前常用的压力梯度法、负压力波法、流量平衡法、超声波检测法、光纤传感等管道安全监测方法[2-4],均是在事件发生后才能识别并报警,且定位精准度都有一定局限。近年来,国内外大量研究的基于光时域反射的分布式光纤传感技术[1,2,5-6],具有监测距离长、定位精度高、灵敏度高、安装施工方便等优点,是未来油气管道安全监测技术的主要发展方向之一。
采用分布式光纤传感技术,搭建了基于相干光时域反射(Coherent optical time domain reflectometer,C-OTDR)原理的分布式光纤振动传感(DistributedVibration Sensor, DVS)系统,以输油管道同沟敷设的通信光缆作为传感单元,建立了西北某输油管道光纤振动监测预警实验平台,并进行了输油管道附近人工挖掘、机械挖掘等外部损坏模拟监测及模式识别测试。
1 技术原理
1.1 光纤中的散射
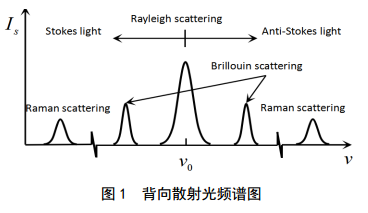
激光入射到光纤中,会产生各种光散射,包括弹性散射和非弹性散射。光纤中的光散射主要包括瑞利散射(Rayleigh Scattering),拉曼散射(RamanScattering)和布里渊散射(Brillouin Scattering),图1为背向散射光频谱图。其中瑞利散射光是入射光与物质发生的弹性散射,散射光频率不发生变化,拉曼散射光和布里渊散射光是入射光与物质发生非弹性散射,散射光频率发生变化。实验采用C-OTDR技术探测光纤中的瑞利散射。
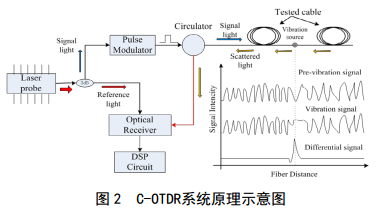
长距离分布式光纤C-OTDR系统原理如图2所示,窄带激光器发射连续激光,经过3dB耦合器将连续光分成两路,一路光作为本振参考光,另一路光经过脉冲调制将连续激光调制为脉冲激光输入到被测光纤中产生散射光信号,将散射光信号与参考光进行外差相干获得被测光纤上各监测点的扰动信号,从而实现被测光缆沿线的外界入侵监测。图2中坐标图分别展示了振动源作用前、作用时及作用后的差分信号波形示意图。振动信号作用时,作用点光纤前端及尾端的信号不受作用点信号串扰。
2 现场实验
2.1 实验目的
以实际输油管道为现场环境搭建实验平台,验证长距离分布式光纤振动监测预警系统DVS在输油管道实施在线监测的可行性。
2.2 实验平台的搭建
以西北某输油管道作为测试现场,分别在其200余公里长的原油管道2#、 9#阀室安装一台单通道监测主机,在6#阀室安装一台双通道监测主机,每个通道方向监测25~30 km。监测主机安装于阀室仪表间机柜中,与交换机进行连接,并将数据上传到同阀室的监控电脑上进行数据处理,连接显示器进行信号展示。系统设置了多个远程监测工作站,分别置于区域控制中心和调度控制中心。工作站可通过专用生产网络对监测主机进行访问与控制,并实时获取各阀室的监测数据,以供客户端软件实施报警响应。
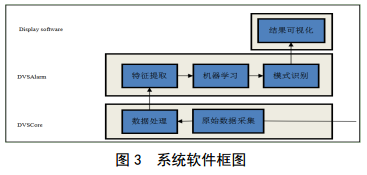
系统软件分为三层,第一层为仪表层,主要功能为采集信号的原始数据和原始数据处理;第二层为算法层,主要接收第一层软件传输过来的数据,对数据进行分析处理,提取信号特征,对数据进行模式识别验证,并将模式识别结果传递到第三层;第三层接收第二层软件传递过来的数据处理结果,结合地理信息将处理结果展示并进行报警提示(图3)。
实验用的传感光纤为随管道同沟敷设的通信光缆,为单模光纤G652。硬件系统搭建完毕后,需要进行软件系统的搭建和配置,首先对输油管道进行GPS定位,结合监测系统展示平台,在坐标定位处进行地面敲击以实现光纤定位,以此确保管道位置与光纤位置的定位匹配。实验采用的GPS定位仪拥有米级定位精度,预警系统的光纤定位精度为10 m,因此光纤与管道匹配精度达到米量级。
获取被监测管道的坐标位置及对应光纤点位后,即可在软件平台电子地图上进行展示。
2.3 实验内容
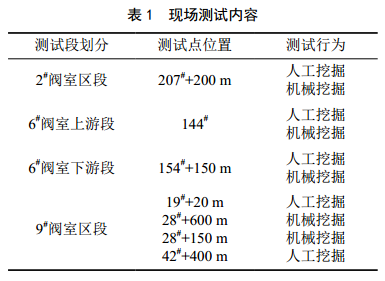
实验包括在测试线路上选定测试点进行人工挖掘和机械挖掘操作,以模拟管道附近的人工挖掘和机械挖掘损坏行为。现场在3个监测区段共选择了7个测试点进行(表1),记录原始数据和报警响应数据,将报警响应数据作为本次实验的最终评价标准。为测试系统的精确性和灵敏度,在部分测试点进行了定位精度、响应范围、响应时间及模式识别准确率测试。
3 实验结果
为预警系统的报警展示界面,每一条报警信息均包含了报警位置坐标、报警模式、报警时间以及报警置信度。
图4(a)为典型的人工挖掘时域监测信号曲线,图4(b)为典型的挖掘机在管道附近真实挖掘行为的时域监测信号曲线。其中,人工挖掘位置相对于监测主机近,机械挖掘相对于监测主机远,因此人 工挖掘的整体信号强度比机械挖掘强,且相对于机械挖掘信号更清晰,主要是机械挖掘受发动机震动的影响,导致信号整体能量较强,而人工挖掘信号局部较强。
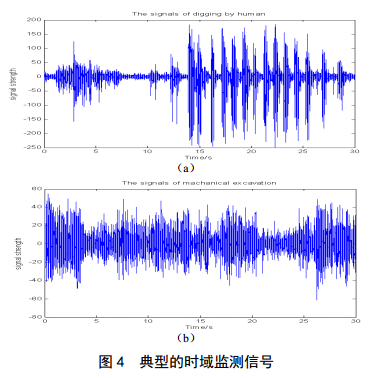
表2为测试点的定位精度测试结果,实验结果显示在测试桩号处进行人工挖掘激励和机械挖掘激励下均能准确报警,报警桩号与测试桩号的距离偏差具有随机性,但总体距离偏差不超过10 m,与本测试系统的定位精度(10 m)比较吻合。

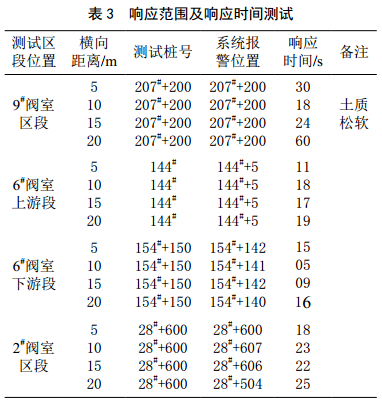
表3为响应范围及响应时间测试结果。在各监测区段各选一个实验点,分别选择垂直于管道走向5、10、 15、 20 m 四个测试点,机械挖掘作为激励源。结果显示各个测试点均有报警输出,所不同的是报警响应时间与测试点的土壤硬度有关。分析表明本系统能响应垂直于管道20 m范围的挖掘行为,当管道周边为干燥硬质土壤时其总体响应时间在30 s内,若为松软土壤,则其响应时间会相应延长。
4 结论
现场实验结果表明,分布式光纤振动监测预警系统能有效的应用于输油管道的振动监测预警,准确进行人工挖掘与机械挖掘等外破行为的模式识别,具有定位精度高、响应时间快、动态监测范围大、敏感度高等优点,为输油管道实时监测外部施工损坏及打孔盗油等异常事件、实现管道损坏事前预警预防提供了合理有效的监测方法。
参考文献:
【1】涂勤昌,韦波,张真毅,等. OTDR型分布式光纤传感器在油气管道监测中的应用[J].管道技术与设备,2015(3):28-31..
【2】赵宏振,戴承奇,祖正宁,等.基于OTDR的油气管道监测及定位方案应用[J].光通信技术,2015, 39(5).
【3】何弼.分布式光纤传感技术在管道监测中的应用研究[J].管道技术与设备,2017(1):9-12.
【4】周德新,樊智勇.管道泄漏监测与控制技术的研究[J].计算机测量与控制,2005,13(3),237-238+264.
【5】Lu Y,Zhu T,Chen L,et al .Distributed Vibration SensorBased on Coherent Detection of Phase-OTDR[J]. Journalof Lightwave
Technology, 2010, 28(22):3243-3249.
【6】Fei Peng,Han Wu,et al . Ultra-Long high-sensitivityФ-OTDR for high spatial resolution intrusiondetection of pipelines[J].
OPTICS EXPRESS,2014,11(22):13804-13810.
作者:张玉龙, 1985年生,工程硕士,长庆油田分公司第二输油处数字化与科技信息中心副主任,工程师,从事输油管道泄漏防控、能耗优化、管道信息化管理与智能化研究等工作。
上篇:
下篇:
 甘公网安备 62010202003034号
甘公网安备 62010202003034号 
